
Честно говоря, хочется иметь возможность более гибкого подхода к поступающим данным без привязки к софту и железу производителя. Не думаю, что компания что-то потеряет от наличия такой библиотеки, скорее наоборот -- их конечные устройства будут более восребованы.
Пока делюсь теми наработками, что накопал.
Протокол успешно декодирован для WirenBoard с описанием вот здесь: http://habrahabr.ru/company/contactless/blog/229469/
Из статьи узнаём, что используется Манчестерское кодирование. Я поискал библиотеку, которая может декодировать сигнал такого типа, используя ресиверы на 433Mhz и, можно сказать, есть обнадёживающие результаты, а именно -- датчики выдают уникальную последовательность, которую можно считывать. Но, к сожалению, разобрать протокол как в статье у меня не получилось -- не хватает знаний, чтобы соответственно подправить используемую библиотеку. Может у кого-то будет возможность поковырять дальше.
Итак, вот библиотека (JeeLib) которая использовалась: http://c2n.me/38pedf1.zip
Вот скетч, который запускал (DATA-ресивера подключена к ноге D2):
скетчПоказать
Код: Выделить всё
/// @dir ookRelay2
/// Generalized decoder and relay for 868 MHz and 433 MHz OOK signals.
// 2010-04-11 <jc@wippler.nl> <a href="http://opensource.org/licenses/mit-license.php" title="http://opensource.org/licenses/mit-license.php" rel="nofollow">http://opensource.org/licenses/mit-license.php</a>
#include <JeeLib.h>
#include "decoders.h"
#define DEBUG 1 // set to 1 to also report results on the serial port
//#define DEBUG_LED // define as pin 1..19 to blink LED on each pin change
#define NODO 0 // use the Nodo shield hardware (only 433 MHz receiver)
// RF12 communication settings
#define NODEID 19
#define NETGRP 5
// I/O pin allocations, leave any of these undefined to omit the code for it
#if NODO
//#define PIN_433 2 // D.2 = 433 MHz receiver
#define POWER_433 12 // must be 1 to supply power to the receiver
#define DEBUG_LED 13 // std Arduino led is also red status led
#else
//#define USE_RF12 1 // only set if the RFM12B hardware is present
//#define PIN_868 14 // AIO1 = 868 MHz receiver
#define PIN_433 2 // AIO4 = 433 MHz receiver
//#define PIN_DCF 15 // AIO2 = DCF77 receiver
#endif
#if PIN_868
VisonicDecoder viso;
EMxDecoder emx;
KSxDecoder ksx;
FSxDecoder fsx;
DecoderInfo di_868[] = {
{ 1, "VISO", &viso },
{ 2, "EMX", &emx },
{ 3, "KSX", &ksx },
{ 4, "FSX", &fsx },
{ -1, 0, 0 }
};
// State to track pulse durations measured in the interrupt code
volatile word pulse_868;
word last_868; // never accessed outside ISR's
ISR(ANALOG_COMP_vect) {
word now = micros();
pulse_868 = now - last_868;
last_868 = now;
}
#endif
#if PIN_433
/*
OregonDecoder orsc;
CrestaDecoder cres;
KakuDecoder kaku;
KakuADecoder kakuA; //WvD
XrfDecoder xrf;
*/
HezDecoder hez;
/*
FlamingoDecoder fmgo;
SmokeDecoder smk;
ByronbellDecoder byr;
ElroDecoder elro;
*/
/*
DecoderInfo di_433[] = {
{ 1, "VISO", &viso },
{ 2, "EMX", &emx },
{ 3, "KSX", &ksx },
{ 4, "FSX", &fsx },
{ 5, "ORSC", &orsc },
{ 6, "CRES", &cres },
{ 7, "KAKU", &kaku },
{ 8, "XRF", &xrf },
{ 9, "HEZ", &hez },
{ 10, "ELRO", &elro },
{ 11, "FMGO", &fmgo },
{ 12, "SMK", &smk },
{ 13, "BYR", &byr },
{ 14, "KAKUA", &kakuA },
{ -1, 0, 0 }
};
*/
DecoderInfo di_433[] = {
{ 1, "HEZ", &hez },
{ -1, 0, 0 }
};
// State to track pulse durations measured in the interrupt code
volatile word pulse_433;
word last_433; // never accessed outside ISR's
#if PIN_433 >= 14
#define VECT PCINT1_vect
#elif PIN_433 >= 8
#define VECT PCINT0_vect
#else
#define VECT PCINT2_vect
#endif
ISR(VECT) {
word now = micros();
pulse_433 = now - last_433;
last_433 = now;
}
#endif
// Outgoing data buffer for RF12
byte packetBuffer [RF12_MAXDATA], packetFill;
// Timer to only relay packets up to 10x per second, even if more come in.
MilliTimer sendTimer;
static void setupPinChangeInterrupt () {
#if PIN_868
pinMode(PIN_868, INPUT);
digitalWrite(PIN_868, 1); // pull-up
// enable analog comparator with fixed voltage reference
ACSR = _BV(ACBG) | _BV(ACI) | _BV(ACIE);
ADCSRA &= ~ _BV(ADEN);
ADCSRB |= _BV(ACME);
ADMUX = PIN_868 - 14;
#endif
#if PIN_433
pinMode(PIN_433, INPUT);
digitalWrite(PIN_433, 1); // pull-up
// interrupt on pin change
#if PIN_433 >= 14
bitSet(PCMSK1, PIN_433 - 14);
bitSet(PCICR, PCIE1);
#elif PIN_433 >= 8
bitSet(PCMSK0, PIN_433 - 8);
bitSet(PCICR, PCIE0);
#else
bitSet(PCMSK2, PIN_433);
bitSet(PCICR, PCIE2);
#endif
#endif
}
// Append a new data item to the outgoing packet buffer (if there is room
static void addToBuffer (byte code, const char* name, const byte* buf, byte len) {
#if DEBUG
Serial.print(name);
for (byte i = 0; i < len; ++i) {
Serial.print(' ');
Serial.print((int) buf[i]);
}
// Serial.print(' ');
// Serial.print(millis() / 1000);
Serial.println();
#endif
if (packetFill + len < sizeof packetBuffer) {
packetBuffer[packetFill++] = code + (len << 4);
memcpy(packetBuffer + packetFill, buf, len);
packetFill += len;
} else {
#if DEBUG
Serial.print(" dropped: ");
Serial.print(name);
Serial.print(", ");
Serial.print((int) len);
Serial.println(" bytes");
#endif
}
}
static void addDecodedData (DecoderInfo& di) {
byte size;
const byte* data = di.decoder->getData(size);
addToBuffer(di.typecode, di.name, data, size);
di.decoder->resetDecoder();
}
// Check for a new pulse and run the corresponding decoders for it
static void runPulseDecoders (DecoderInfo* pdi, volatile word& pulse) {
// get next pulse with and reset it - need to protect against interrupts
cli();
word p = pulse;
pulse = 0;
sei();
// if we had a pulse, go through each of the decoders
if (p != 0) {
#if DEBUG_LED
digitalWrite(DEBUG_LED, 1);
#endif
while (pdi->typecode >= 0) {
if (pdi->decoder->nextPulse(p))
addDecodedData(*pdi);
++pdi;
}
#if DEBUG_LED
digitalWrite(DEBUG_LED, 0);
#endif
}
}
// see <a href="http://jeelabs.org/2011/01/27/ook-reception-with-rfm12b-2/" title="http://jeelabs.org/2011/01/27/ook-reception-with-rfm12b-2/" rel="nofollow">http://jeelabs.org/2011/01/27/ook-reception-with-rfm12b-2/</a>
static void rf12_init_OOK () {
rf12_initialize(0, RF12_868MHZ);
rf12_control(0x8027); // 8027 868 Mhz;disabel tx register; disable RX
// fifo buffer; xtal cap 12pf, same as xmitter
rf12_control(0x82c0); // 82C0 enable receiver; enable basebandblock
rf12_control(0xA68a); // A68A 868.2500 MHz
rf12_control(0xc691); // C691 c691 datarate 2395 kbps 0xc647 = 4.8kbps
rf12_control(0x9489); // 9489 VDI; FAST;200khz;GAIn -6db; DRSSI 97dbm
rf12_control(0xC220); // C220 datafiltercommand; ** not documented cmd
rf12_control(0xCA00); // CA00 FiFo and resetmode cmd; FIFO fill disabeld
rf12_control(0xC473); // C473 AFC run only once; enable AFC; enable
// frequency offset register; +3 -4
rf12_control(0xCC67); // CC67 pll settings command
rf12_control(0xB800); // TX register write command not used
rf12_control(0xC800); // disable low dutycycle
rf12_control(0xC040); // 1.66MHz,2.2V not used see 82c0
}
// DCF77 radio clock signal decoder
#if PIN_DCF
static word dcfWidth;
static byte dcfLevels, dcfBits, dcfParity, dcfValue[8], dcfBuf[6];
static byte dcfExtract (byte pos, byte len) {
word *p = (word*) (dcfValue + (pos >> 3));
byte val = (*p >> (pos & 7)) & ((1 << len) - 1);
return val - (val / 16) * 6; // bcd -> dec
}
static byte dcfMinute () {
dcfBuf[0] = dcfExtract(50, 8);
dcfBuf[1] = dcfExtract(45, 5);
dcfBuf[2] = dcfExtract(36, 6);
dcfBuf[3] = dcfExtract(29, 6);
dcfBuf[4] = dcfExtract(21, 7);
dcfBuf[5] = dcfExtract(17, 1);
return 1 <= dcfBuf[0] && dcfBuf[0] <= 99 &&
1 <= dcfBuf[1] && dcfBuf[1] <= 12 &&
1 <= dcfBuf[2] && dcfBuf[2] <= 31 &&
dcfBuf[3] <= 23 && dcfBuf[4] <= 59;
}
static void dcf77setup () {
pinMode(PIN_DCF, INPUT);
digitalWrite(PIN_DCF, 1); // pull-up
}
static byte dcf77poll () {
byte ok = 0;
static word last;
word now = millis();
if (now != last) {
// track signal levels using an 8-bit shift register
dcfLevels = (dcfLevels << 1) | digitalRead(PIN_DCF);
#if DEBUG_LED
digitalWrite(DEBUG_LED, dcfLevels & 1);
#endif
if (dcfLevels == 0x07F) {
// found one 0 followed by seven 1's
if (dcfWidth > 1000) {
if (dcfBits == 59)
ok = dcfMinute();
memset(dcfValue, 0, sizeof dcfValue);
dcfBits = 0;
}
dcfWidth = 0;
} else if (dcfLevels == 0xFE) {
// found seven 1's followed by one 0
// Serial.print(" >");
// Serial.println((int) dcfWidth);
if (dcfWidth >= 144) {
dcfValue[dcfBits>>3] |= _BV(dcfBits & 7);
dcfParity ^= 1;
}
switch (++dcfBits) {
case 15: dcfParity = 0;
case 29: case 36: case 59: if (dcfParity) dcfBits = 0;
}
dcfWidth = 0;
}
dcfWidth += now - last;
last = now;
}
return ok;
}
#endif // PIN_DCF
void setup () {
#if DEBUG_LED
pinMode(DEBUG_LED, 1);
// brief LED flash on startup to make sure it works
digitalWrite(DEBUG_LED, 1);
delay(100);
digitalWrite(DEBUG_LED, 0);
#endif
#if DEBUG
Serial.begin(9600);
Serial.println("\n[ookRelay2]");
#endif
#if USE_RF12
#if PIN_868
rf12_init_OOK();
#else
rf12_initialize(NODEID, RF12_868MHZ, NETGRP);
#endif
#endif
#if PIN_433
setupPinChangeInterrupt();
#endif
#if POWER_433
pinMode(POWER_433, 1);
digitalWrite(POWER_433, 1);
#endif
#if PIN_DCF
dcf77setup();
#endif
}
void loop () {
#if PIN_868
runPulseDecoders(di_868, pulse_868);
#endif
#if PIN_433
runPulseDecoders(di_433, pulse_433);
#endif
#if PIN_DCF
if (dcf77poll())
addToBuffer(0, "DCF", dcfBuf, sizeof dcfBuf);
#endif
if (sendTimer.poll(100) && packetFill > 0) {
#if USE_RF12
#if PIN_868
rf12_initialize(NODEID, RF12_868MHZ, NETGRP);
#endif
rf12_sendNow(0, packetBuffer, packetFill);
rf12_sendWait(1);
#if PIN_868
rf12_init_OOK();
#endif
#endif
packetFill = 0;
}
}
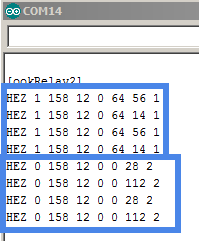
два раза нажал на одну кнопку, потом два раза на вторую -- видем небольшое изменения при каждом нажатии, но, судя по описанию протокола, это нормально
Библиотека распознаёт код как HEZ-протокол ( http://homeeasyhacking.wikia.com/wiki/H ... cking_Wiki ) и читает 7 байт, но на ноолайте полезная нагрузка длиной в 74 бита, если не ошибаюсь и что-то у меня не получилось переделать обработчик этого протокола на большую длину последовательности данных.
В общем, если кому интересно, то милости просим